����John Ziegler��Zeke����Nathaniel Nichols���ܲ��ǰl(f��)������-�e��-�֣�PID�����������ˣ��������������Ļ�·�������gʹ��PID�㷨�����Б����ڹ��I(y��)�I��ȵķ������Ʋ���������õ�����Ziegler-Nichols�������g��1942���һ�ΰl(f��)��������ֱ���F(xi��n)��߀���V���ؑ������������
�����F(xi��n)��������^�Č�PID��·�ġ�����������ָ�{�������������H�y���õ����^��׃��ֵ�c����ֵ֮�g���`��a���ķ����õķe�O�̶ȡ�������ɿ����^��������������Ԓ�����ôPID�㷨�����O�ó�ֻҪ��һ���S�C�ĸɔ_��׃���^��׃������һ��������׃���O��ֵ�r������ܲ�ȡ���ٺ��@���Ą���������
�����෴���������������^�̌���(zh��)�������e���`�������������Á������^��׃����Ԓ�����ôPID�㷨����ڱ��^�L��һ�Εr�g�ȑ��ø��鱣�ص�У���������������·�����ı��|���Ǵ_�������������îa�����^�̷����õķe�O�̶Ⱥ�PID�㷨�������`������ṩ���Ď����������
����Ziegler��Nichols����·���������һ���ɲ�����������������һ���^�̵��О��OӋ��һ���yԇ�������@���yԇ�Ǹ���(j��)���^�����ø�׃�ĕr���^��׃����׃�˶����Լ���׃�ж����OӋ�������������ͬ�rҲ������һ��ʽ����Щ�yԇ�Y���D��������������_�������O�Å���(sh��)������������(sh��)�����Ziegler��Nichols�䌍����˃ɷN���g���@�ɷN���g���ڿ��ƹ���������2003��7�°�����¡���·�������A�������������������
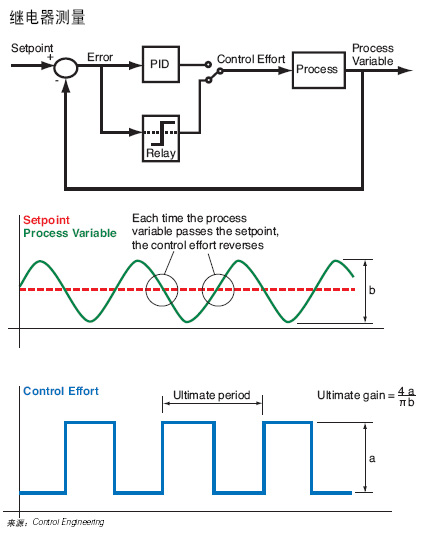
�D1�����˴_���^�̵��R������Tu���R������Pu���������������R�rʹ����PID
�㷨ʧЧ��ȡ����֮����һ��ON/OFF���^������^��׃?y��u)���ʎ��������@�ɂ�����(sh��)�ܺõČ��^���О��M���������ԛQ��PID��������ԓ����������õ�������]�h(hu��n)��·��������
������������
�����ܶ�����������oՓ�Εr��һ���µĿ��ƻ�·��ɕr���Ziegler-Nichols�������g��������փ�һ�ӱ�����؈�(zh��)������һ�����̎����ȕ��\��Ziegler-Nichols�yԇ����ӛ䛿����������ò��Ҍ�����׃���ĽY���M��һ�������D��ͨ�^څ�ݾ��Π�^���О�׃�ø����������������·�M��������ƥ������^��������Ȼ�����»�·���Ԅ�ģʽ���_ʼ���a�������
���������ÿ����·�����@����������nj����Ǽ����{��ζ�����؏͵Ĺ������������@���������ĽY�������������˝M����������һЩ�؏͵Ĺ����Еr�DZز����ٵģ�����������������(sh��)��ʹ���]�h(hu��n)��·�����ܳɞ���õ��������
�����������o70����������PID�����������е�����O��͚���O�����ϵ���ȫ��(sh��)�ֻ���̎�����r�����������Ԅӵ�ʹ��Ziegler-Nichols��·�������g��������Փ�ϣ�����һ����ȫ����Ϥ�������g���A�IJ�����Ҳ����ͨ�^��һ�����o���ʹ�ÿ����������M���^���О�yԇ�����������x����������(sh��)������]�h(hu��n)��·���О�Y�����C����oЧ��Ԓ�����ô������ֻ��Ҫ���ε��ٴΰ��ǰ��o��
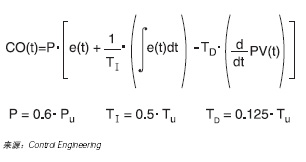
�D2���������t���PID �㷨�����ϣ��Q���ˏĿ�������CO(t)���^��׃�� PV(t)�Լ��`��e(t)֮�g���^��׃�����O��ֵ������������� ͨ�^�{��(ji��)������������(sh��)������������P���e�֕r�gTI ���֕r�gTD ���{��(ji��)�e�O���õĴ�С�������Ziegler ��Nichols �������t��������(j��)�^���R������Tu���R������Pu��Ӌ������m����������(sh��)ֵ���
��������T�����������A�������������r��PID��·�����ж����������ڿ��ƹ����s־�x����һ�����µ��{���������ُ�I��ʹ�û�·���������Ñ��������J��ʹ��PID�㷨��PID����������Ҫ�Ĺ������������Լ��c�ⲿ�O��ͨӍ���������Щ������Ҳ���Ԅ�������������������Ȼ����������ͨ�����H�Hָ���^�̿����_ʼ�ĕr�������ͬ��Ҳָ�������^�̲����е�һ�N�m�����g��������B�m(x��)�����������DZ��J�������Ҫ��һ헹��������ڿ��ƹ��̜y���s־����������������
�����Ԅ��A�S�yԇ
�������������Ј���ͨ��һ�������ڵ��Ԅ������������ǁ���MicroMod �Ԅӻ���˾��53MC500�^�̿���վ�������ʹ�õ��Ǻ��������㷨���@�㷨������Fischer & Porter��˾���F(xi��n)����ABB��˾��һ�����T����1980���_�l(f��)�����������������Ԅӈ�(zh��)��һ��������_�h(hu��n)Ziegler-Nichols�����A�S�yԇ��ʹ�ÿ������ڂ�����������̖ȱʧ�ĕr��a��һ�����������õ�ͻ׃������
�����^��׃��׃���ĴΔ�(sh��)���_����Kֵ63.2%�ĕr�g�������ش����˷�(w��n)�B(t��i)������^�̵ĕr�g����(sh��)�������·�еĂ��������ð��b���h�x��(zh��)�����ĵط���Ԓ���������ô�^��푑����@���A�Sݔ������F(xi��n)�r�����@�r���������A�S��̖ݔ��ĕr�̺��^��׃���״��_ʼ�����õĕr��֮�g�ĕr�g����ɵ������
�����@����ģʽ����(sh��)ʹ���������㷨�@����������Ҫ�����P�����^�̵���Ϣ��������������A���^�̌�����Ό����_��������������������ǃH�H���ṩ�A�Sݔ����̖���@�Ӿ�ʹ���������㷨����Ӌ����������(sh��)�������� �c�^����ƥ�����
�����]�h(hu��n)��·�yԇ
984�꣬��似�g�о�����Karl �str�m��Tore H�gglund�l(f��)����һ��Ziegler��Nichols�]�h(hu��n)��·���������ĸ����������������_�h(hu��n)��·�ķ����������ԓ�����Ǽ����^�́��R�e���О����������ԓ�����o���R�e���������e�ķ�����̖�������
����ֻ�Ю��^��׃������һϵ������ѭ�h(hu��n)�ȳ��m(x��)����ʎ�ĕr�������str�m-H�gglund����������Ч���������������������Ȍ�һ���A�Sݔ����̖�ӵ��^���ϲ������Ñ��O���Ĕ�(sh��)ֵһֱ������ֱ���^��׃��ֵ���^���O��ֵ������������ǂ�ؓ�A�S��̖����Ҫ�ȴ��^��׃�����½����O��ֵ֮�¡�ÿ���^��׃��������һ����������ʎ���^���O��ֵ���c�������ò�ͬ���r���؏��@�^��������DZ����ͬһ�l�����M�С�
�������һ����ʎ����Ҫ�ĕr�g���Q���^���R�����ڣ�Tu����������ɂ���ʎ֮�g����λ�����4/��͵õ����ٽ���ҋ��Pu�����Ziegler��Nichols����Փ�ό��F(xi��n)�����@�ɂ�����(sh��)�������(w��n)�B(t��i)���������r�g����(sh��)��������r��������������������������ʽ���������t��Ӌ������m����������(sh��)�������
���������{���l(f��)�F(xi��n)���@ЩҎ(gu��)�tͨ��ʹ�ÿ����������O��ֵ���˞��׃�������^��׃�����S�C�_�Ӷ����п��ٵ�푑�����Ȼ�������������������@��������Ԓ���ܕ������{���^��׃����
��ʎ�������Դ����(sh��)�������������ṩ���ɹ��x�������Ҏ(gu��)�t��������@�ӿ��Ԝp�ٿ�������׃�ķe�O�̶��������һ��������ͨ��ֻ��Ҫ�x����Ҫ���푑��ٶȣ���������������������٣��������Ȼ����������Ԅ��x����m��Ҏ(gu��)�t��� ����������������
������ͬ���^��������䌍�ѽ��ɞ��̘I(y��)���Ԅ������������Ę˜������M���N���̺����ἰ�������õ��ļ��g������1987������Fisher��������DPR900�λ�·��������ʹ�������Ϳ�������Fisher�z���xɢ�Ϳ���ϵ�y(t��ng)Provox�Լ�����DeltaV��������������еĐ�Ĭ��������������������ʹ��Åström-Hägglund���g������
�������˵õ����龫�_�ĽY������������@Щ����������һ�����Ўׂ���ʎ������ѭ�h(hu��n)�������·�����һЩ������PID���������������T�ӵ�Sipart DR19��Ascon��DeltaDue������ֻ����һ����ʎ������ѭ�h(hu��n)�������������Ҋ����һ��ʎ���������ߗl������
����ʹ�Æ��������ʎ��Åström-Hägglund�^����yԇ����������ͬ�ӿ�����Ӣ�S˼��˾��Eurotherm��Red Lion������ʹ�á����е�Watlow����������Tru-Tune���܁�����Ѓɂ�������ʎ���^����yԇ������̘I(y��)�����������������چλ�·�Ͷ��·������������xɢ�Ϳ���ϵ�y(t��ng)���ɾ���߉�������ͻ���PC�Ŀ������������� �����]���f�ܵķ���
�������ҵ��Ǿ�������߰汾��ʹ��Ziegler-Nichols�]�h(hu��n)��·�������g��Åström-Hägglund�yԇҲ���ܽ�Q���е�PID�������}�����⮔���ƉĻ�һ���_�Ӹɔ_�˜yԇ��������^��׃����׃�����ϵ��^���О�ĸ�׃����ʹ���������y����Ҫ����������
��������^���О鲻����ȫ�Ŀ��A�y��Ԓ�������������Y���ľ����������������Ҫ������Ԓ��ԓֻ���Jÿ��Ӌ������ą���(sh��)�ĵ�һλ���ǿɿ��ģ���ˮ����]�h(hu��n)��·��������Ԕ��Ҫ���Ԓ����ҪһЩ�ք��{������
�����yԇ�����ڑ��õĕr����F(xi��n)���}������һ������ѭ�h(hu��n)����ʹ�^����һ�����ɽ��ܵij̶��Д��������str�m-H�gglund���������S�����T�{��(ji��)�������õ���ʎ�ķ�ֵ����ô�������κ���ʽ���˞�_�ӕr�͕����F(xi��n)���벻���IJ�����r������@�N��r���������Ȼ�l(f��)���ĸɔ_���O��ֵ��׃���ó����^�̷����О��ǻ�·������õķ������
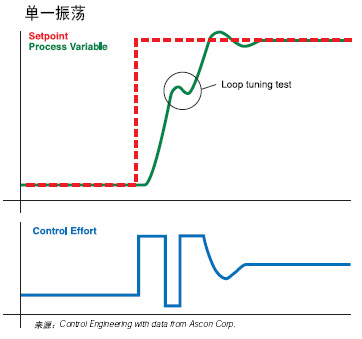
��һ��ʎ����
���������õ��^�̵��О����ஔһ�µĕr����ô��ֻ��Ҫһ����ʎ���_���R������Tu���R������Pu����Ascon��˾��DeltaDue�ضȿ������������κΕr�����T��Ҫ��׃�O��ֵ���^5%�r�M��һ����һ��ʎ�yԇ�����������ʹ���^������M�л�·�����yԇ�������������O��ֵ��׃�ij�ʼ��������������^��׃�������һ����������ʎ������Ӌ���һ���µ���������(sh��)Ȼ���ٻ֏�PID�㷨����������^��׃���_�����O��ֵ�r����������͕��a��һ������푑�������С�ij��{��r���������������O��ֵ�ĸ�׃����5%����DeltaDue���������M��һ������ʎ��āstr�m-H�gglund�^����yԇ�����@�ɂ��������ǿ��е�������Ҫ��ȡ�Q�ڿ͑��Լ���ϲ��������
 |

