|

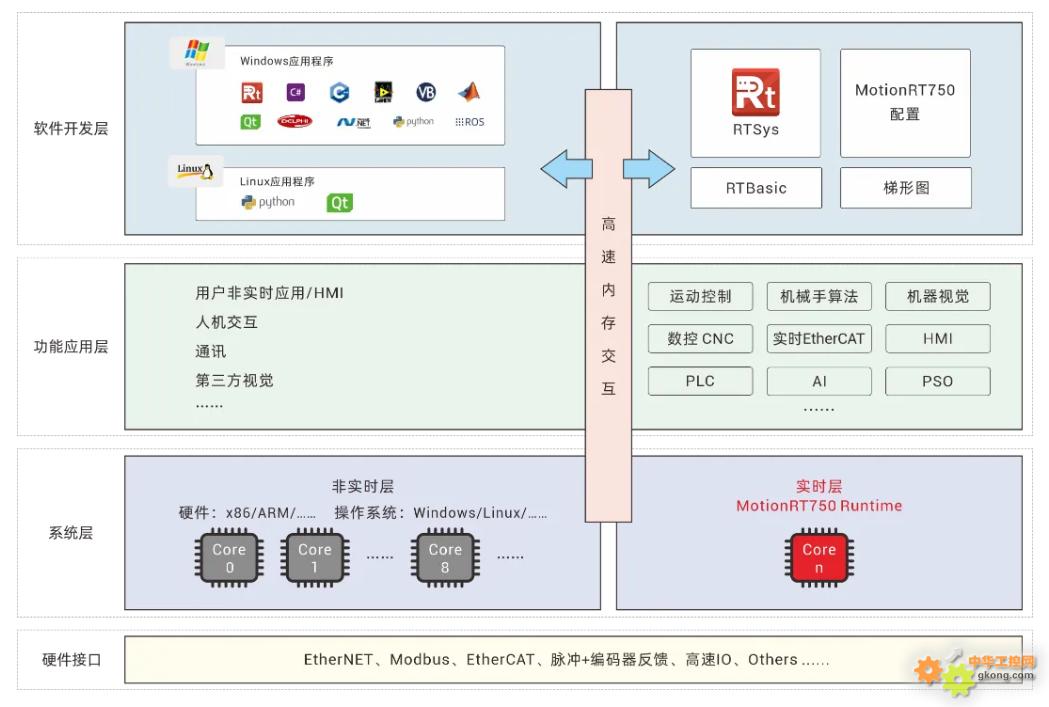
���y(t��ng)��ӹ���ϵ�y(t��ng)�Y��
�@Щ���}���ڌ��¹��S���R������a�pʧ������
�ڌ��H���a�У����y(t��ng)���Ϸ�ʽ�ڑ�������o��ѯB�Ͷ�Ʒ�N�������s�ΑB(t��i)����r�����������RЧ�ʵ�����Q�������ɱ���������������L����������Բ�������ه�˹��Ȇ��}��ͨ�^�͑��F(xi��n)���Č��Ȕ�(sh��)��(j��)�@ʾ��

���Թ����Ј����x
���Թ���վ�ںϙC��ҕ�X�����������ӱP�c�Cе�ֵȼ��g�����������Ԅӹ���ϵ�y(t��ng)������������y(t��ng)���Ϸ�ʽ�������܉��M��С�������á���Ʒ�N�����ГQ����������ݑ����������aģʽ�ij��m(x��)����(zh��n)�����m���ڌ�������p��������׃�εľ����㲿����������F(xi��n)����ֲ��c�������ϵ������������

�� ���Թ��Ͽ͑������V��
�S��3C���M�����������Ӱ댧�w�����܇�㲿���������5GͨӍ���ИI(y��)�����Ի����a������������������Թ�������u�ɞ����a���Ę˜����÷���������ڴ˻��A���Mһ�����F(xi��n)���ߵ�UPH�c���������ӿ췽�������c�s�̹���������ѳɞ�����Ñ��Pע�Ľ��c�����
�� �F(xi��n)�з�����ʹ�c��
���O�����cϵ�y(t��ng)�����̵Č��H�����У����˝M���@Щ����������������Ҫ�ѯB����Ӳ���ܘ������ö���ܛ��������������@�N��ʽ�mȻ�����Rȫ������sϵ�y(t��ng)׃�Ï��s������K�˲����ˆTʹ���T��������������y�Ԍ��F(xi��n)�������x�ϵ�“ɵ�ϻ�”����ģʽ�������
�� ���Ʊډ��������τ�(chu��ng)��rֵ��
ֻ��ͨ�^������������ҕ�X�c�Cе�ֿ����M�и߶�һ�w�������܉���Ñ��Įa���������(w��n)������������������Ч��ͨ�û��Ľ�Q�������

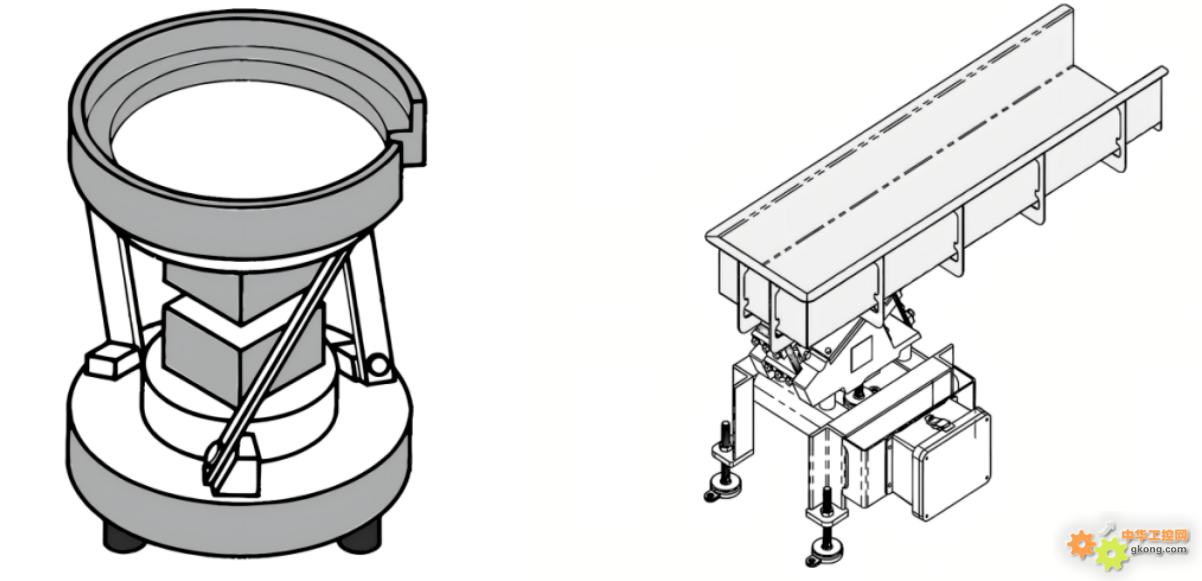
�������ϳ�Ҋ�Cе�����Թ��Ϸ������á�
������ϵ�y(t��ng)��ҕ�X�c�Cе�ֲ��ٞ���Զ���(zh��n)������Թ��ϲ��������F(xi��n)�졢����������(w��n)����
�����Ј�����������\������VPLCϵ�ЙC��ҕ�X�\�ӿ���һ�w�C����Ƴ����ԙCе��ҕ�X���Ͻ�Q�������ĸ�����ͻ���˂��y(t��ng)���Թ��ϵ�“����”�������

�� ���\�ӽ�Q����
�R�e��≥99%��UPH����10%��20%����Q�͕r�g�s��60%���؏Ͷ�λ���ȣ�±0.02mm���
���\�Ӵ��ƾ��ޣ�������“������+ҕ�X+�Cе�ֿ���”�M��ܛӲ�����������Ⱥ�����ϵ�y(t��ng)����������������˽M���g�Ļ��������������F(xi��n)�������o�p�\�п��������a���߂�“��֪���Q�ߣ���(zh��)��”���]�h(hu��n)���������������oՓ�ԺηN�ˑB(t��i)�ѷ����������ܱ�ҕ�Xϵ�y(t��ng)���ʶ�λ��������°l(f��)ָ��o�Cе������������ϲ������������������o��֒�Ч�����
����֧��DELTA��SCARA�����XYZR�ȶ�N�Cе��ģ���㷨�����ڶ��������ИI(y��)�V����������������Ñ��ṩ��������������Ч����(w��n)������ͨ�õĽ�Q����������
��SCARA�Y���Cе�����Թ����\��ҕ�l��
��DELTA�Y���Cе�����Թ����\��ҕ�l��
��XYZR�Y���Cе�����Թ����\��ҕ�l��
���\�ӽ�Q�������Ĺ�ˇ���̣�ҕ�X+�\�ӿ����]�h(hu��n)

�@һ�]�h(hu��n)��ˇ�����“�o��”��“����”�����������F(xi��n)����������������(w��n)�����Թ����c�֒������
�����ɱ�������ϵ�ҕ�X�c�\�ӿ��������������һ�I�ГQ��ˇ�����������H����Q�R�eģ���(sh��)������o�������OӋ�ξ����������ɴ���s�̓Q��������������M�o�ٶȣ��p��ͣ�C�r�g��������aЧ������p���M���Ʒ�N�������С��������������ӆ�����������aģʽ�����������
���\�����ԙCе��ҕ�X���Ͻ�Q������(y��u)��
01 ܛӲ���߶ȼ���
����IO�����������Cе�ֿ����������C��ҕ�X����\�ӿ����cͨӍ��һ�w���o���~�����ù��ؙC����C���˿���늹��䡢���ͳɱ���ͬ�r�����O�䰲�b���g�����s���Ŀ�_�l(f��)�����c���g�S�o�y������

02 ���ܲ�������
��������Ϳ������յ��{ԇ����������Cе���{ԇ�����C��ҕ�X�{ԇ��������P�{ԇ�ȹ��ܼ�����һ�������������Ʒ�NС������������������F(xi��n)��Ч��ݮaƷ�Q�����

03 һ�I��������ҕ�Xģ��
���ٴҕ�X�������������o�辎�����s�� ��λ�Cҕ�X���a����ͨ�^��קҕ�X������ɹ��܌��F(xi��n)�������xʽ��ģ��ʹ�ø��Ӻ����������

04 ��ˇ�����S��
֧����Д[�P�������c�����������Զ��x�b�䡢�P�бP��������A�͔[�P�������C�w�������Ƥ���ӑB(t��i)ץȡ����A������P�ӑB(t��i)ץȡ��������M�������ϳ�Ҋ������������

05 ��Y�����Թ���
֧�������ϳ�Ҋ��XYZRģ�M�Cе�������DELTA��(li��n)�Cе�֡�SCARA�Cе�ֵ�����ͬһ������ҕ�X���Ͻ�Q���������������(j��)���È�����ͬ���x�������Y�����

06 �Զ��x���ܔUչ
֧���Ñ�ʹ�� Basic�Z�ԡ�HMI�M�B(t��i)���F(xi��n)�Զ��x������չ�������߅�����S�cIO߉���ơ��IJ��ַǘ˄�����ˇ��������

�����\�����Թ��Ͻ�Q������������\��ҕ�l��

-
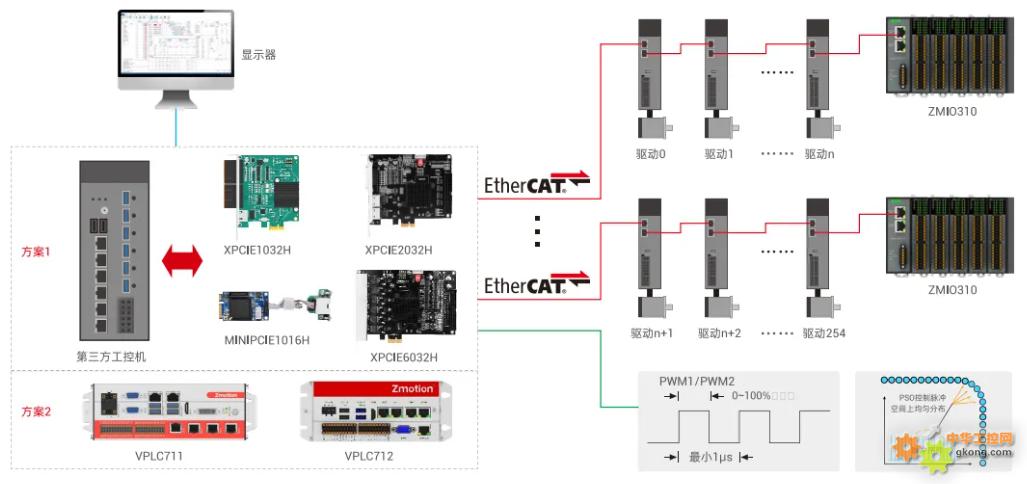
���x4-64�S�\�ӿ��ƣ��}�_+EtherCAT�������������EtherCAT��СͨӍ����250us����
-
���Ï����r�\�ӿ��ƃȺ�MotionRT750����֧�ֵ�����ҕ�Xܛ�������
-
���d20·ͨ��ݔ�루����VPLC711��10·��VPLC712��8·�����ݔ�룩����20·����ݔ��������
-
����x86�ܘ���EtherCAT����ҕ�X�\�ӿ���������֧��Ó�C�\�������������S����ҕ�X���\�ӿ��ƹ��ܣ����������������������
-
֧��EtherCAT����������Q���c����ͣ�C������Ԅ��\�ಢ���m(x��)�\�����������ϵ�y(t��ng)�ɿ��ԣ������S�o�������
-
�ṩһ�w���_��ʽIPC�ΑB(t��i)�Č��rܛ������/ܛPLC���ɵ�ҕ�X+�\�ӿ��ƽ�Q������

-
���d�h(hu��n)������ܘ����_���ǹ��Ϗ�վ���m(x��)�������� EtherCATͨ��������@������ϵ�y(t��ng)�ɿ����c�\�з�(w��n)���ԡ�����Ч�Ž^EtherCATͨӍ���ό��µĮa�ܓpʧ������
-
��Windows�����֡�Ӳ��������λ��ӛ_ͻ����ϵ�y(t��ng)�����r����\�ӿ��ƌ��r�Ⱥ�MotionRT750�Կɳ��m(x��)�\��,�Ҽ�ͣ������Ȼ������Ч���ṩ���푑��r�g�M���¹�̎����������@���������I(y��)���ư�ȫ���c�ɿ���������
���\�Ӽ��g��ע���\�ӿ��Ƽ��g�о���ͨ���\�ӿ���ܛӲ���aƷ���аl(f��)���LJ��Ҽ����¼��g��I(y��)����������\�Ӽ��g�R���ˁ����A�顢���d�ȹ�˾�ă�(y��u)���˲���������ڈԳ�������(chu��ng)�µ�ͬ�r��������e�O(li��n)�ϸ����У�f(xi��)ͬ�\�ӿ��ƻ��A���g���о��������LJ��ȹ����I��l(f��)չ������I(y��)֮һ��Ҳ�LJ����������������������\�ӿ��ƺ��ļ��g�͌��r����ܛ��ƽ�_���g����I(y��)����Ҫ�I(y��)���У��\�ӿ��ƿ�_�\�ӿ�����_EtherCAT�\�ӿ��ƿ�_EtherCAT������_�\�ӿ���ϵ�y(t��ng)_ҕ�X������__�\�ӿ���PLC_�\�ӿ���_�C���˿�����_ҕ�X��λ_XPCIe/XPCIϵ���\�ӿ��ƿ��ȵ����
|

